




The XC330 series is a compact and lightweight DYNAMIXEL.
XC330 series is an upgraded version of XL330 series. It enhanced its durability by applying Metal Gear and Bearing.
1.Various Operating Modes
Velocity Control, Position Control, Extended Position Control, PWM Control, Current Control, Current Based Position Control
2.Profile Control for Smooth Motion Planning
3.Input Voltage : 3.7V ~ 6V ( Recommended 5V)
4.Enhanced Durability by applying Metal Gear and Bearing<
5.Support RC Protocol without additional converting device
6.Energy Saving with Reduced Current
*Please be aware that the voltage range is 3.7V ~ 6V.
| Item | Quantity | Description |
|---|---|---|
| XC330-M181-T | 1 | DYNAMIXEL |
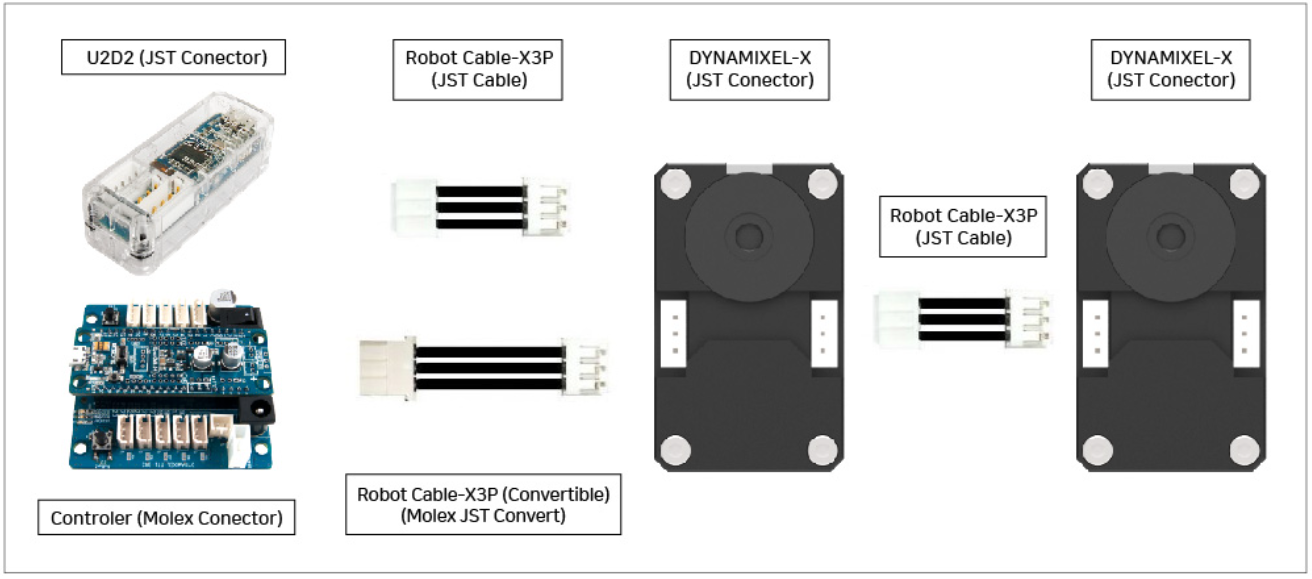
| Robot Cable-X3P 180mm | 1 | TTL 3p cable(JST – JST) |
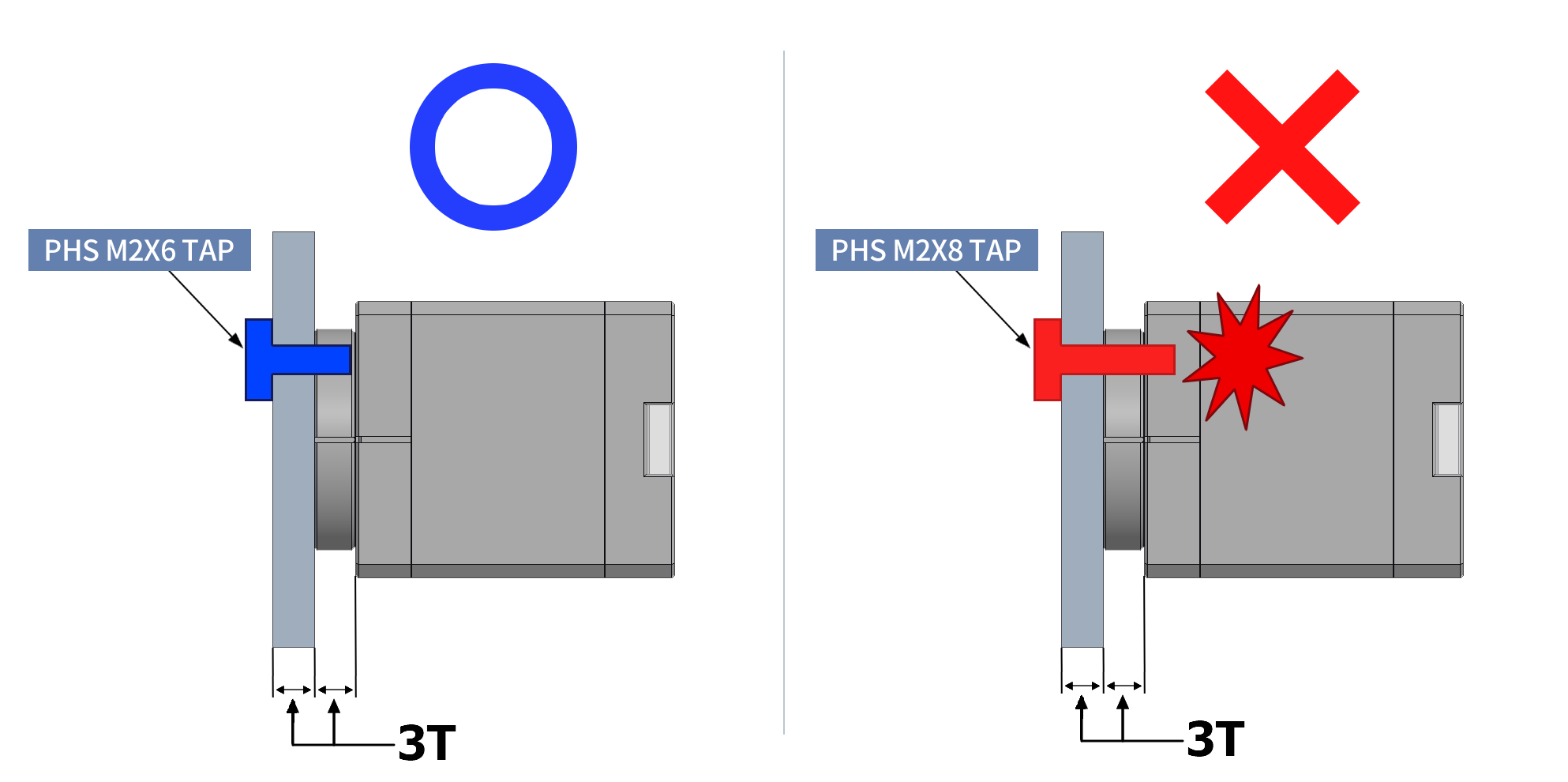
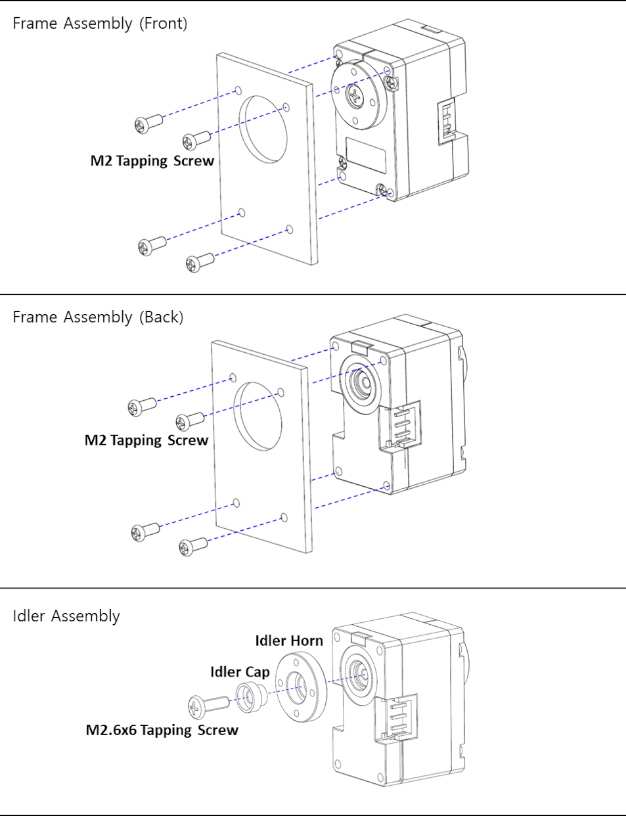
| PHS M2x6 TAP | 6 | Bolts for horns |
| PHS M2x8 TAP | 10 | Bolts for frames |
* Please purchase the frames for the X330 models separately.
* The idler and the idler cap are included in the FPX330-H101 4PCS Set. (Not sold as a standalone.)
| Model Name | XC330-M181-T | |
|---|---|---|
| MCU | Cortex-M0+ (64 [MHz], 32bit) | |
| Input Voltage | Min. [V] | 3.7 |
| Recommended [V] | 5.0 | |
| Max. [V] | 6.0 | |
| Performance Characteristics | Voltage [V] | 5.0 |
| Stall Torque [N·m] | 0.60 | |
| Stall Current [A] | 1.8 | |
| No Load Speed [rpm] | 129.0 | |
| No Load Current [A] | 0.15 | |
| Continuous Operation | Voltage [V] | – |
| Torque [N·m] | – | |
| Speed [rpm] | – | |
| Current [A] | – | |
| Resolution | Resolution [deg/pulse] | 0.0879 |
| Step [pulse/rev] | 4 | |
| Angle [degree] | 360 | |
| Position Sensor | Contactless absolute encoder (12Bit, 360 [deg]) Maker : ams(www.ams.com), Part No : AS5601 |
|
| Operating Temperature | Min. [°C] | -5 |
| Max. [°C] | 60 | |
| Motor | Coreless | |
| Baud Rate | Min. [bps] | 9,600 |
| Max. [bps] | 4,000,000 | |
| Control Algorithm | PID | |
| Gear Type | Spur | |
| Gear Material | Metal | |
| Case Material | Engineering Plastic | |
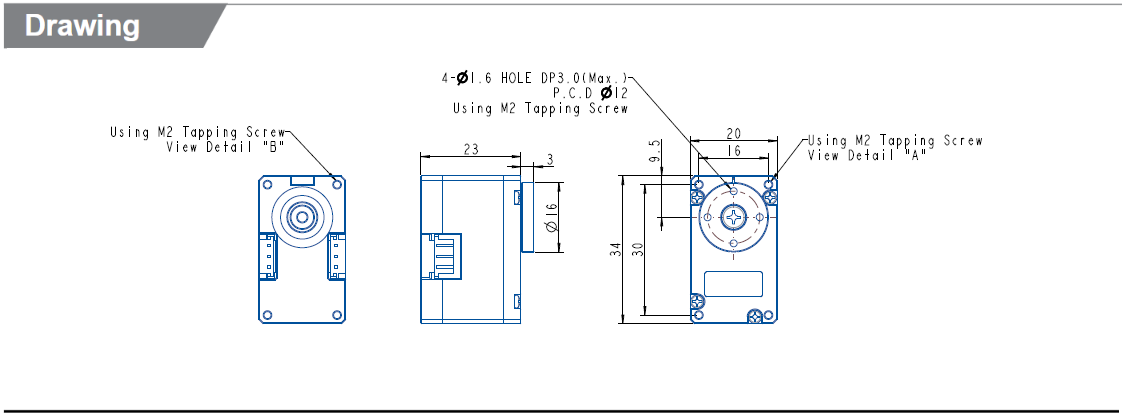
| Dimensions (WⅹHⅹD) [mm] | 20.0 x 34.0 x 26.0 | |
| Dimensions (WⅹHⅹD) [inch] | 0.78 X 1.33 X 1.02 | |
| Weight [g] | 23.00 | |
| Weight [oz] | 0.81 | |
| Gear Ratio | 180.6 : 1 | |
| Command Signal | Digital Packet | |
| Protocol Type | Half duplex Asynchronous Serial Communication (8bit, 1stop, No Parity) | |
| Link (Physical) | TTL Level Multi Drop Bus | |
| ID | 0 ~ 252 | |
| Feedback | Position, Velocity, Current, Realtime tick, Trajectory, Temperature, Input Voltage, etc | |
| Protocol Type | Protocol 2.0 Experimental S.BUS Experimental iBUS RC-PWM |
|
| Operating Mode / Angle | Current Control mode:Endless turn Velocity Control mode:Endless turn Position Control Mode:360 [deg Extended Position Control Mode:±256 [rev] Current-based Position Control Mode:±256 [rev] PWM Control Mode:Endless turn |
|
| Output [W] | – | |
| Standby Current [mA] | 17 | |






